
内容物を確認しよう
標準同梱品
- SLAM200本体
- バッテリー
- ベースプレート
- GNSSアンテナ
- アンテナマウント
- AC充電器 (Aタイプ/Cタイプ)
- USBケーブル
- USBドングル
- 標準マニュアル
- ファイバークロス
- 取付ねじ ×6本
- L字レンチ
オプション品
- ドローンマウント
- 三脚
- バックパックユニット
- 車載ユニット
- 予備バッテリー
ソフトウェアをインストールしよう
SLAM GO app ( iOSバージョン )

上記リンクからアプリをダウンロードします
SLAM GO app ( Androidバージョン )
上記リンクからアプリをダウンロードします
SLAM GO app ( Windowsバージョン )
SLAM GO POST Pro
PCスペック
前提条件
NVIDIA製またはIntel製グラフィックカードを搭載していること
※AMD製グラフィックカードはサポート適応外です
AMD製CPUを搭載したノートパソコンとNvidia製グラフィックカードの組み合わせはお勧めしません。
メーカーによっては、グラフィックカードの独立出力構成に互換性の問題が発生する場合があるからです。
※上記組み合わせにける動作確認状況
Not support:ASUS製 ROGシリーズにおけるAMD製CPUを搭載したノートパソコン
support:Lenovo R7000P(Lenovo PC Managerでディスクリートグラフィックスモードへ切り替え)
最低要件
| OS | Windows11 64ビット |
| CPU | Intel 第8世代以降 |
| メモリ | 8GB 以上 |
| GPU | NVIDIA GTX 1050 以降 |
| SSD/HDD空き容量 | 10GB以上 |
参考スペック
| OS | Windows11 64ビット |
| CPU | Intel core i9 – 13900 |
| メモリ | 64GB |
| GPU | NVIDIA RTX 3080 |
30分間連続計測データでの解析時間(参考) 3時間
解析精度:高精度
解析データ範囲:0.5~300m
点群カラー化:有効
点群最適化:高密度設定
ダウンロード/インストール
上記リンクより “UAVManager” をダウンロードして 任意の場所へインストールします
※デフォルト設定ではuserフォルダです
インストール実施後、”UAVManager” を起動します
C:\Program Files (x86) などにインストールした場合以下のようなメッセージが表示されます
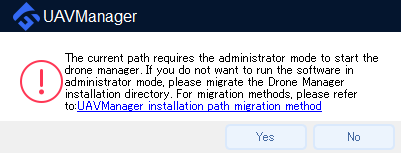
管理者権限が必要とメッセージが出ますがOKをクリックし
ユーザーアカウント制御画面で再度OKを選択してください。
このメッセージを再表示したくない場合、”管理者として実行”をするか、インストールフォルダを
DドライブやUserフォルダへ変更してください
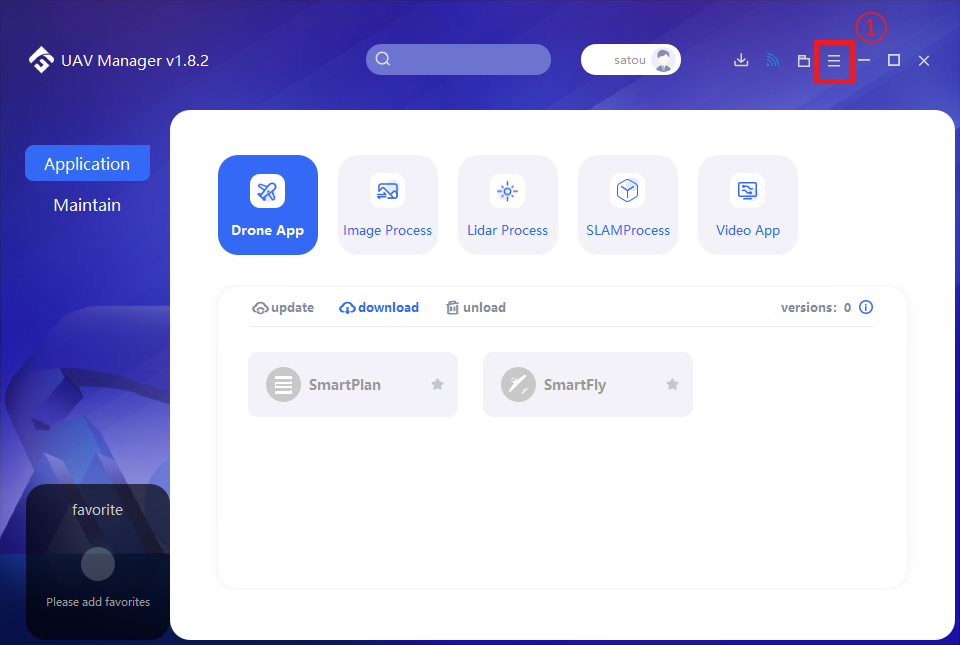
ソフト初回起動時は英語です、英語で支障がない場合はそのままで結構です
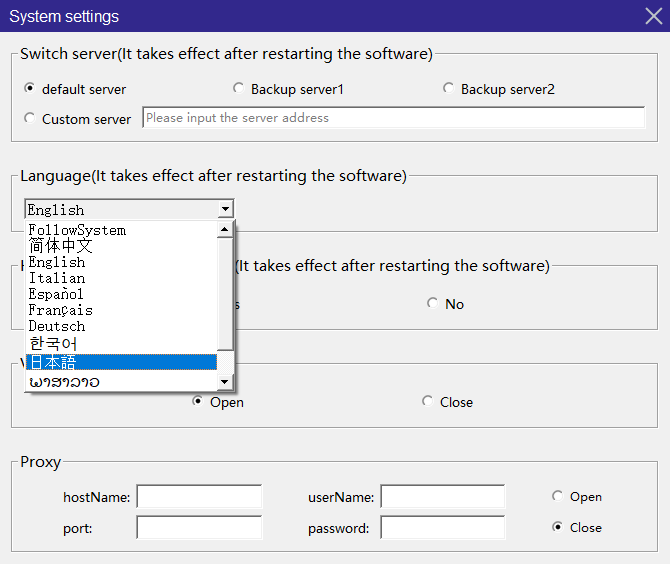
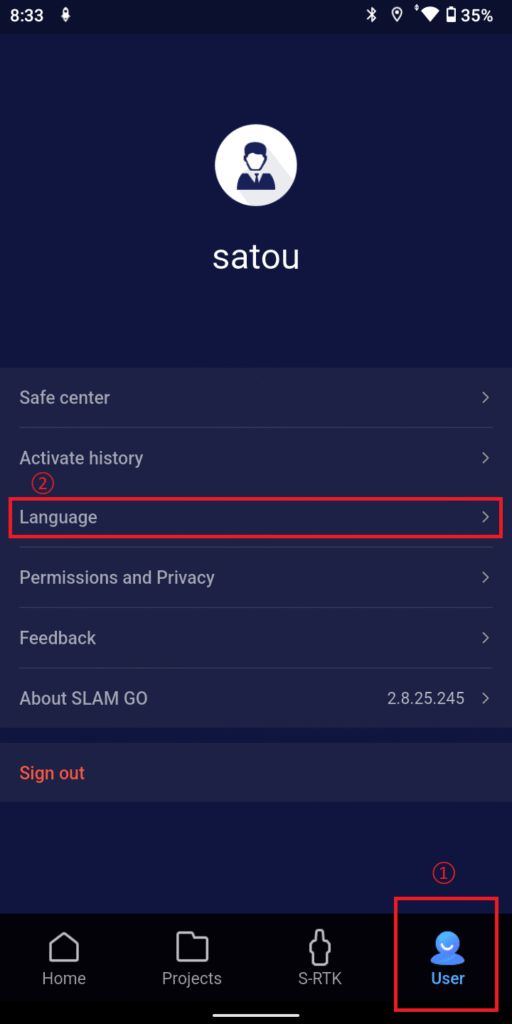
日本語へ変更する場合は上部メニュー①から Settings → Language → 日本語 を選択してください
次回起動時より日本語表示に変更されます
“SLAMProcess”を選択する
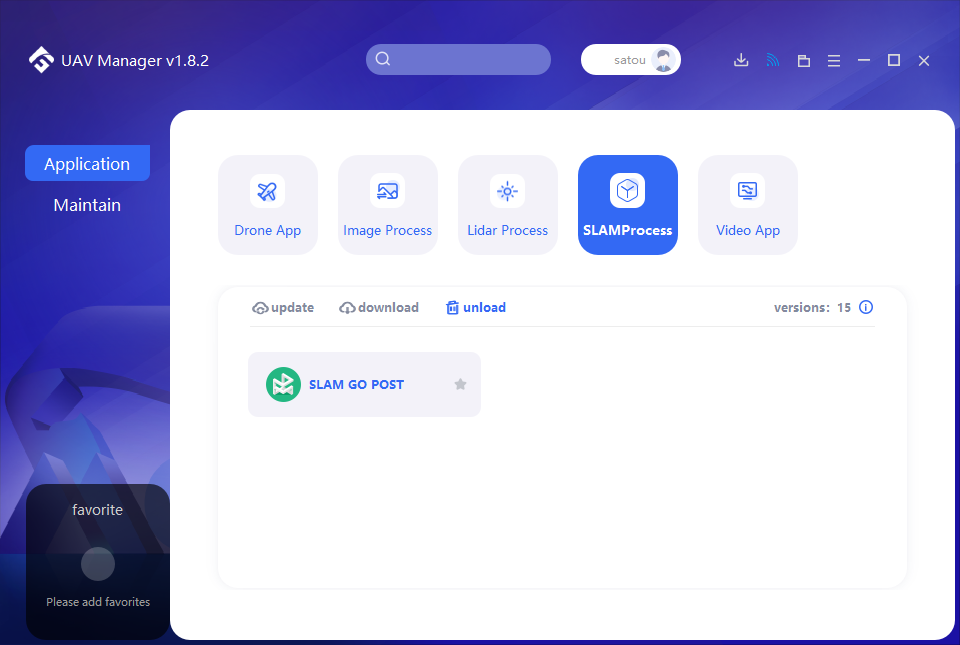
“download” クリックし”SLAM GO POST”をダウンロードする
インストール完了後 “UAVManager” “SLAM GO POST” を終了し、再度起動する
“UAVManager” “SLAM GO POST”のバージョンチェックが実施され最新バージョンへのアップデートが
自動的に実施されます
機器の初期設定をしよう
言語設定をしよう
SLAM GO app 及び SLAM GO POST ともにオプションメニューから日本語表示へ切り替えが可能です
機器接続設定をしよう
SLAM200はインターネット接続されたWi-fiネットワークを利用してiPhone / iPad / androidスマートフォンへ接続し、点群のリアルタイム取得・GCP名称設定・Ntrip設定・計測モードの変更が可能です
iPhone / iPad / androidスマートフォンのブルートゥースをONにする
SLAM200を起動し、機器の初期化が完了するまで待つ
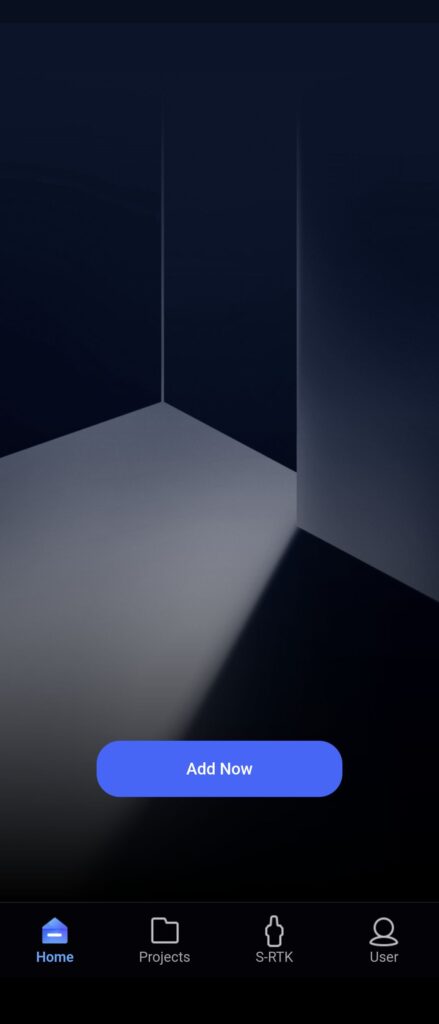
SLAM GO app を起動し、機器追加ボタン(add Now)をタップする
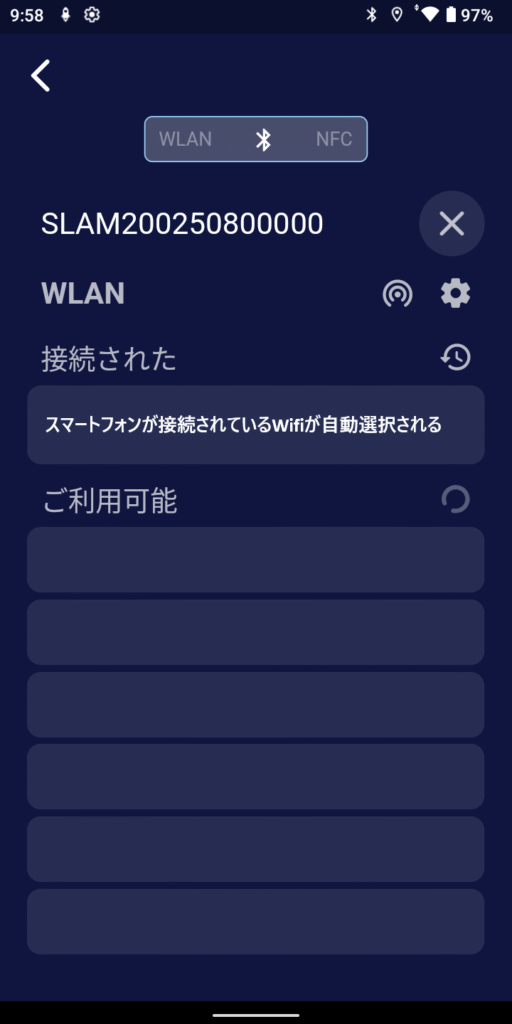
ブルートゥース接続画面に切り替える (Wifi 接続画面から左にスワイプして切り替え)
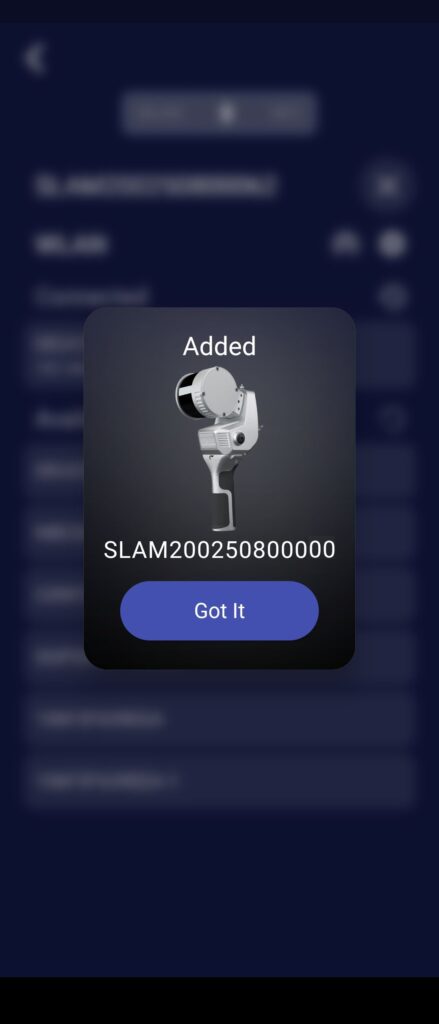
追加したい機器を選択する (SLAM200XXXXXXXXXという機器IDで表示されます)

Wi-fiネットワークを選択し、パスワードを入力する
※iPhone / iPad / androidスマートフォンがWi-fiネットワークに接続されている場合、デフォルトで同一ネットワークが選択され、自動的に接続処理が完了します
位置情報補正サービスの設定をしよう
位置情報補正サービスを使用することで高精度GNSS測位による点群データのローカライズが可能です
各情報提供サービスの契約書面等をお手元にご用意の上、設定して下さい
下記の情報はジェノバ社でのご契約の場合となります、他社の場合は都度読み替えの上、入力/設定をお願いいたします。
デバイスが接続された状態で画面右上から設定画面を開きます

RTK設定を選択します
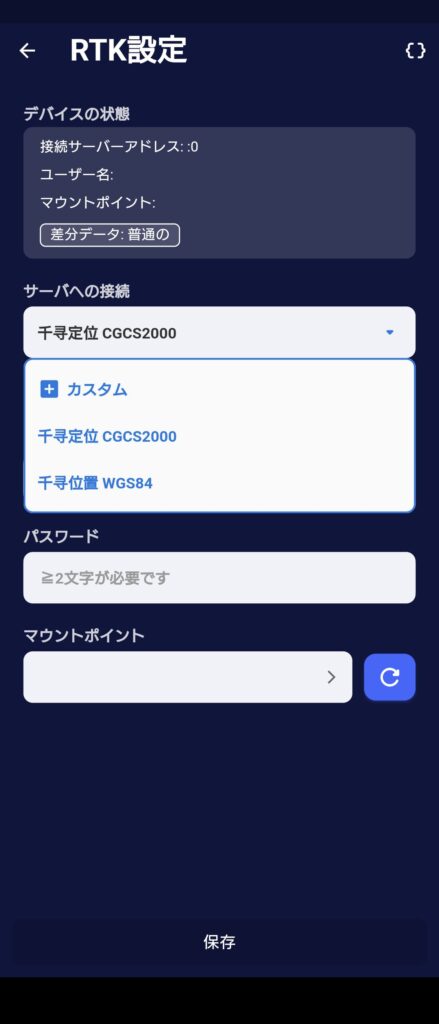
接続先サーバーを登録するため”サーバへの接続”メニューのプルダウンメニューから”カスタム”を選択します

各情報提供サービスの契約書面等を参考に
接続サーバーアドレスとポート番号を指定します
ラベルについては、管理しやすい名称を任意で設定してください
入力が完了したら、画面下部のチェックマークをタップします

自動的に前の画面に戻ります
ユーザー名とパスワードを契約書面を参考に入力します
マウントポイントをSLAM200で取得できるGNSS衛星に応じてプルダウンリストの中から選択します
SLAM200で受信できる衛星は以下の通りです
GPS/GLONASS/Garileo/baido/QZSS
入力が完了したら画面下部の保存をタップします
計測モードの設定をしよう
SLAM GO app バージョン 2.8.15以降から、ハンドヘルドモード及びペイロードモードの切り替えが可能です。ペイロードモードを使用する場合はDJI sky port への変換アダプターが別途必要です
アップデートをしよう
本体ファームウェアをアップデート
ファームウェアアップデートが利用可能な場合、SLAM200がSLAM GO appに接続されると同時にファームウェアアップデートを促すメッセージが表示されます
メッセージに従いアップデートを実施してください
各ソフトウェアをアップデート
ソフトウェアアップデートが利用可能な場合、各ソフトウェア起動後自動的にアップデートが実施されます
